Kick-off
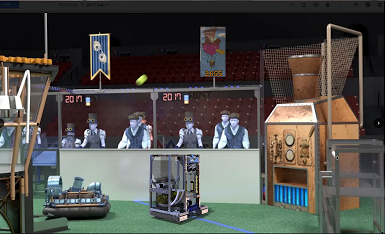
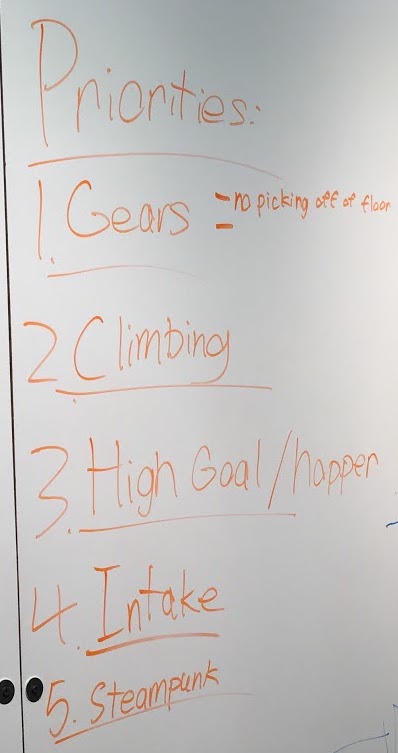
Due to inclement weather, all kick-off events in North Carolina were cancelled, so we watched the stream remotely, and chatted over messaging and a conference call. When we were able to meet in person at the Platy???? Den, we created this list of priorities after reviewing the game. Then we considered the pros and cons of each robot volume, and decided on the taller one.
We then decided on a mecanum wheel drive system, for extra agility to combat defense bots, and starting tentatively planning out the drive train. At this point, we knew what we wanted as a base, so the design team moved to more of the actual design capacity than the concept.

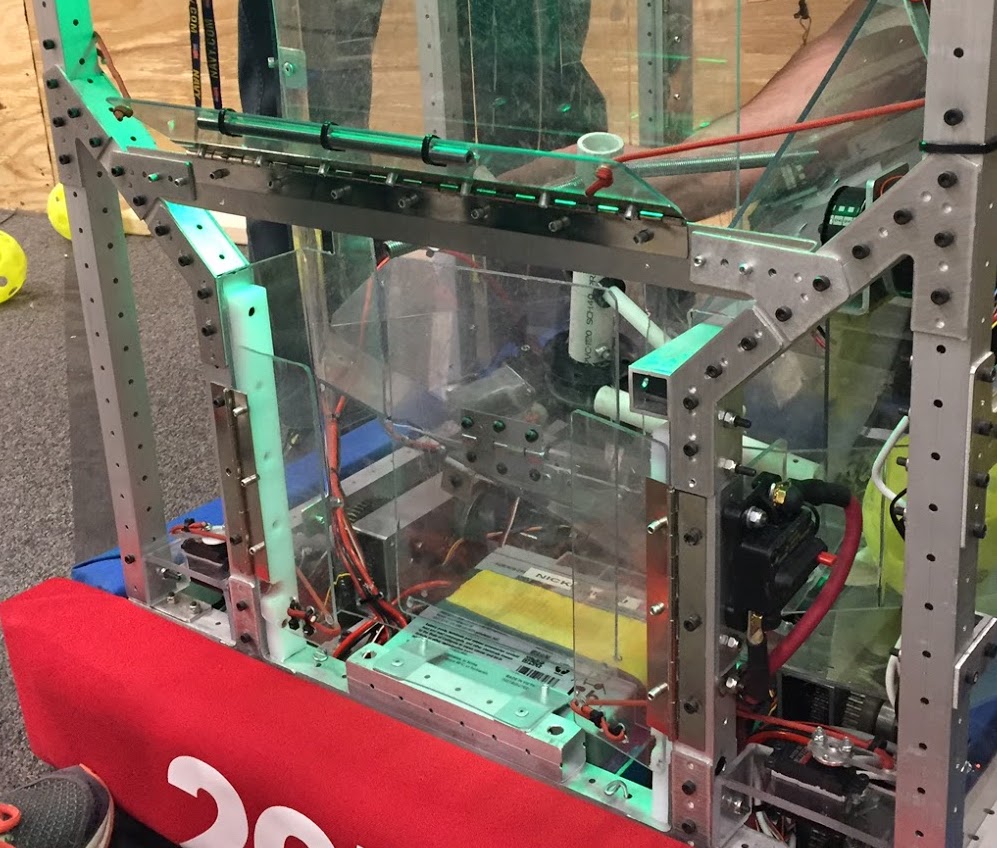
Robot Design
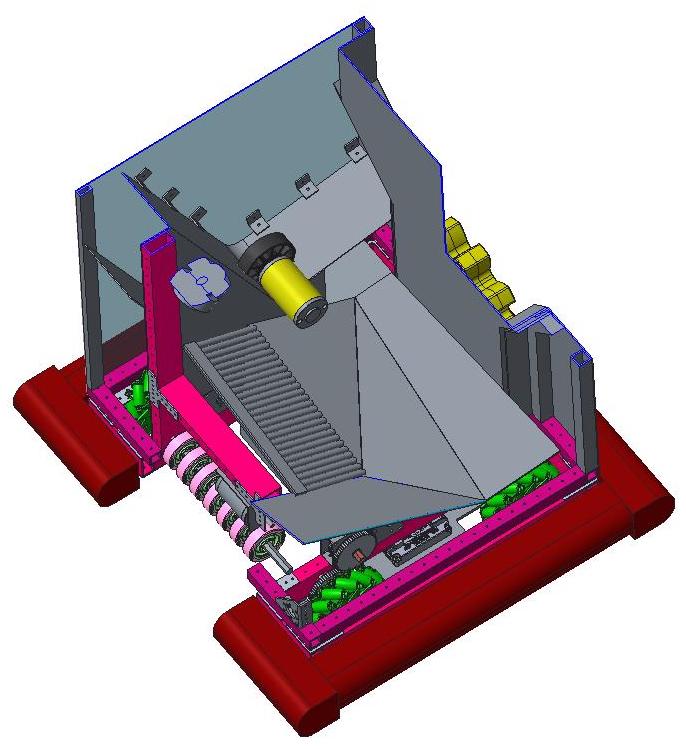
Chassis
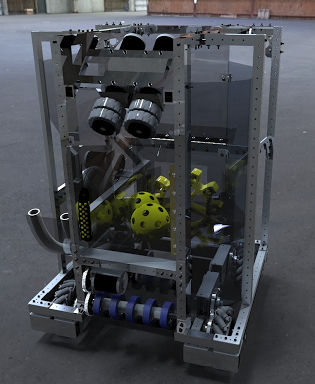
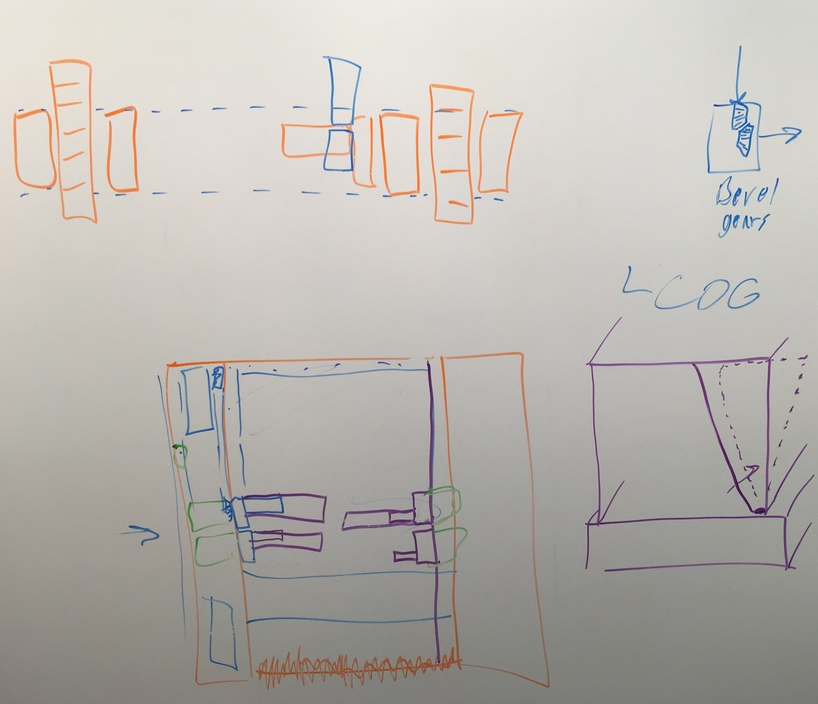
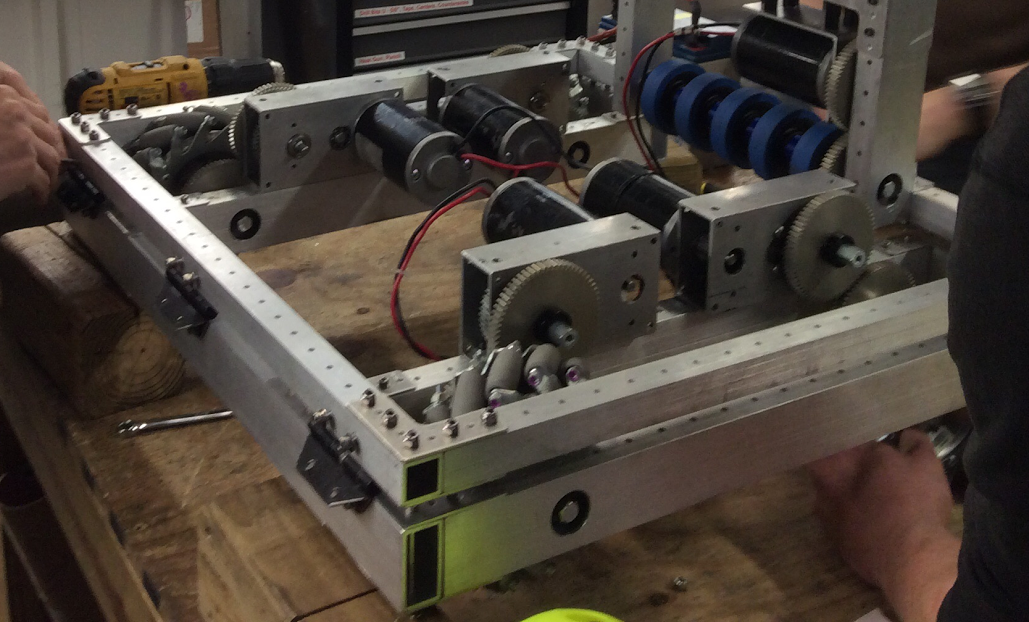
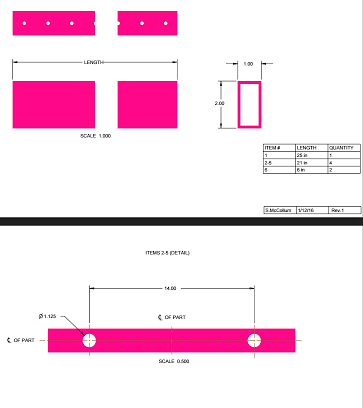
We decided to go with a C-shaped frame, to allow for a passive ball-pickup system. We were also able to start with predetermined piece sizes, as we started using Vex’s Versa-Frame system. Given the volume we had selected, all there was to design for the chassis was where we placed our drive motors, gearboxes, and wheels. As we were planning out where to place the electrical board, the idea surfaced to have an upper frame on top of the lower one, that could hinge open—much like a car hood. This was also the inspiration for our robot’s name—Unhinged!
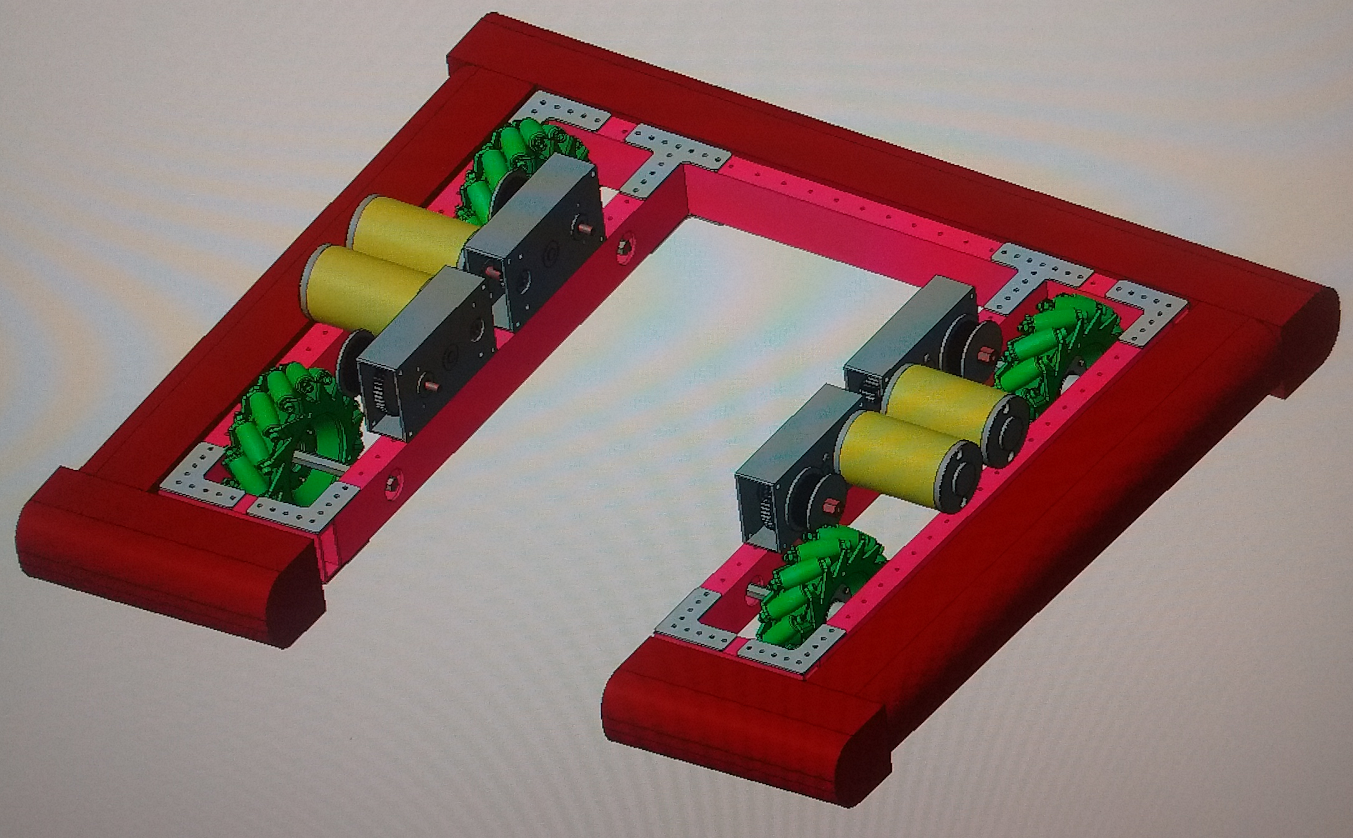
Drive System
- CIM Motors: We went with these motors for their power and reliability
- Toughbox Nanos: We decided to use these gearboxes because they are smaller and only have one motor input
- Mecanum Wheels: We selected these wheels for their agility
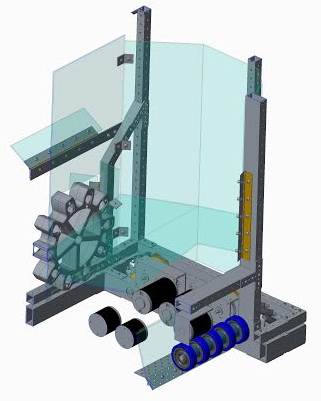
Ball Intake
Given we wanted a passive ball-intake system, we created a set of wheels, directly above the open channel in the frame, that would suck any fuel they came into contact with into the robot; at which point a backstop would direct the fuel up, and into the hopper. The bars which hold the ball-intake system are also the support for our rope-climber.

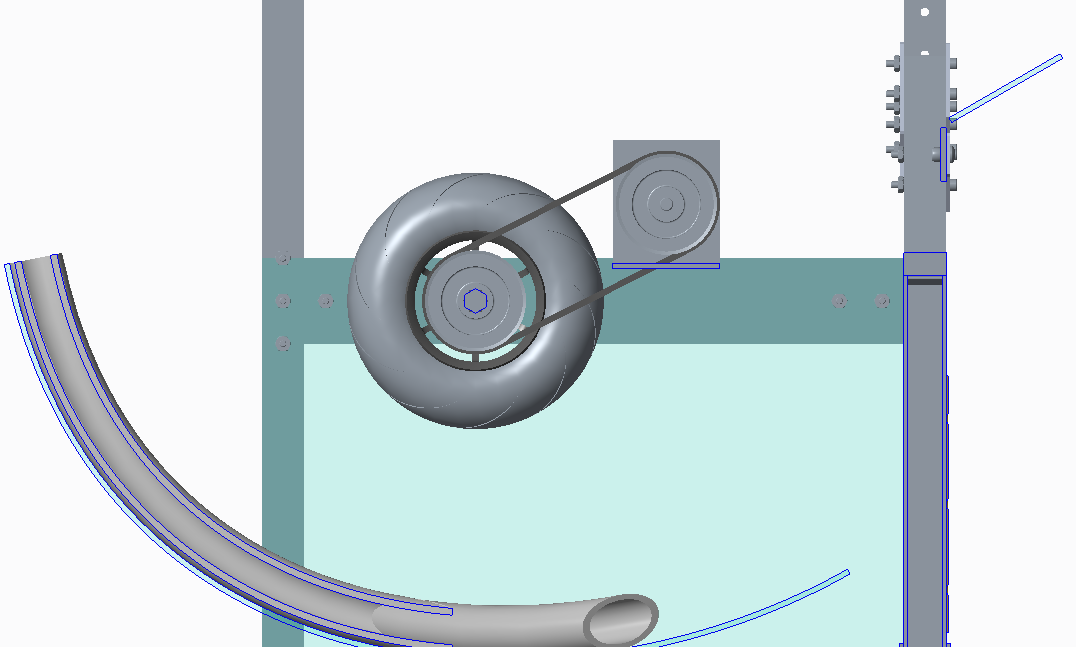
Ball Shooter
The hopper directly feeds into the ball shooter, which consists of a curved piece of lexan and PVC rails that guide the fuel through the launcher. We have edited the ball shooter design multiple times to achieve maximum ball efficiency when launched. Recently the ramp was modified to shoot the fuel into the low goal because shooting at the high goal was inconsistent.
We changed the shooter wheel from a four inch compliant wheel to a six inch pneumatic wheel because there was not enough mass to throw the ball.

Hopper
The hopper is made out of a sheet of lexan bent to funnel the fuel into the ball shooter. We crafted a physical model of the hopper using a piece of cardboard then referenced the bends/folds onto the lexan sheet. The inside of the robot contains hopper walls that intentionally curve around the inside corners because the fuel would otherwise get stuck.
We also included an agitator to ensure no balls were jammed inside the hopper, which was then attached bottom of the hopper, and pushes the fuel towards the ball shooter using PVC pipe and a window motor.
Rope Climber
We drew our first iteration climber concept from FIRST Updates Now and, after prototyping and eliminating it as an option, we created a new climber system. The new one consisted of a hook-tape-wrapped bar, connected to a mini-CIM; the bar corresponded to loop-tape attached to the end of our rope. Then, in order to take the robot off of the rope, we used a rachet system, allowing us to remove the ratchet, and let the climb bar go in reverse.

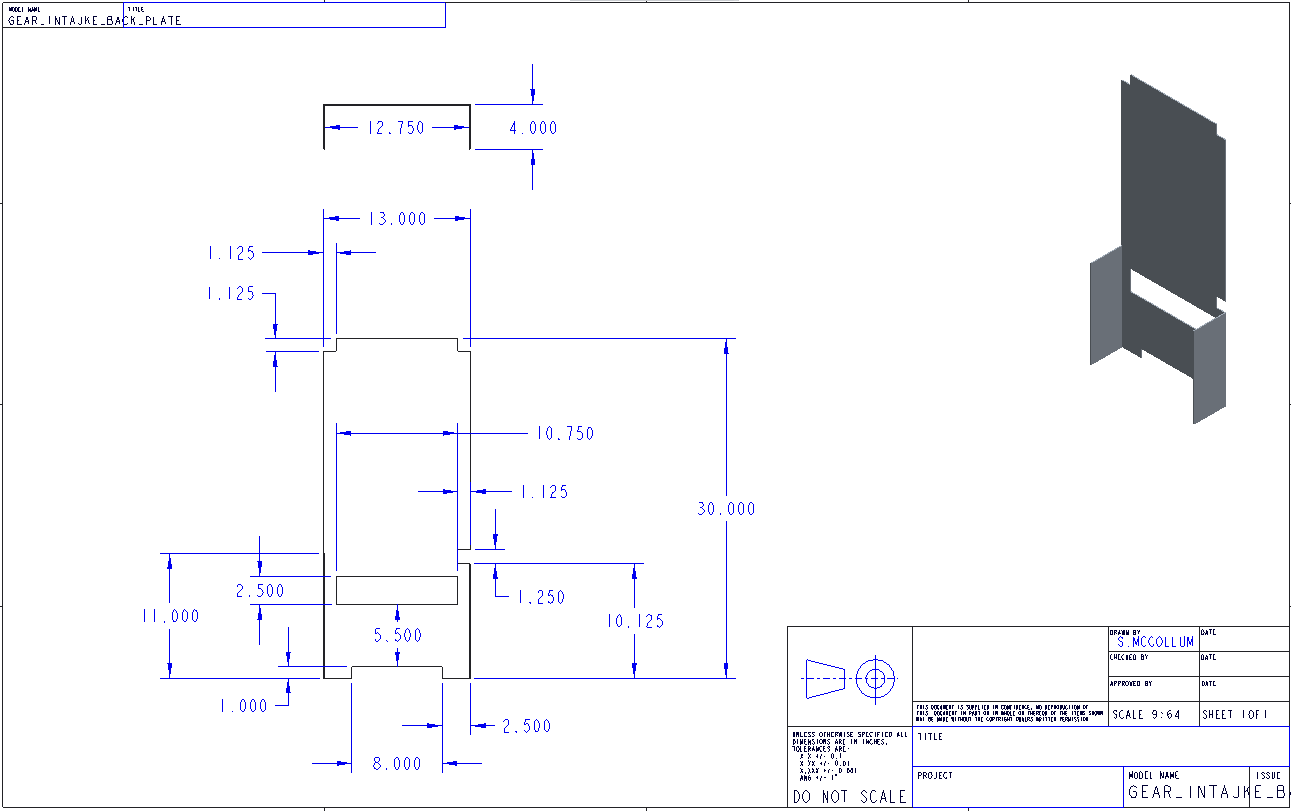
Gear Slot
When fidgeting around with propositions for a gear system, it was generally accepted that the robot would have an open slot to accept gears straight from the gear station, and doors holding the gear back from falling from within its slot. It was then considered a good idea to have a system to eject the gear from its slot using a forked-levering-apparatus to slip the gear onto the corresponding peg on the airship. However, due to weight and other rational decisions, the idea for a lever arm was abandoned, and rather it was decided upon to use servo motors to actuate the gear slot doors. There is also the comical ramp at the top of our gear slot that merely falls and is then suspended by two measly strings once the robot starts moving, and provides a continued incline of which the gear uses to slither into its slot and not drop on the floor, as we decided it was not worth attempting to be able to retrieve fallen gears.
Bag Day
On bag day we tried to get in all the fine-tuning and driver practice we could get. We worked mainly on auto routines, and driving using solely cameras. The, at 11:57 pm we bagged Unhinged!